I am a great fan of point clouds. They offer so many analysis possibilities, insight, and extraction capabilities that they are hard to compare with any other type of 3D content. Yet we all know that despite rich attribution we lack the skills of proper interpretation unless we are highly trained to do so.
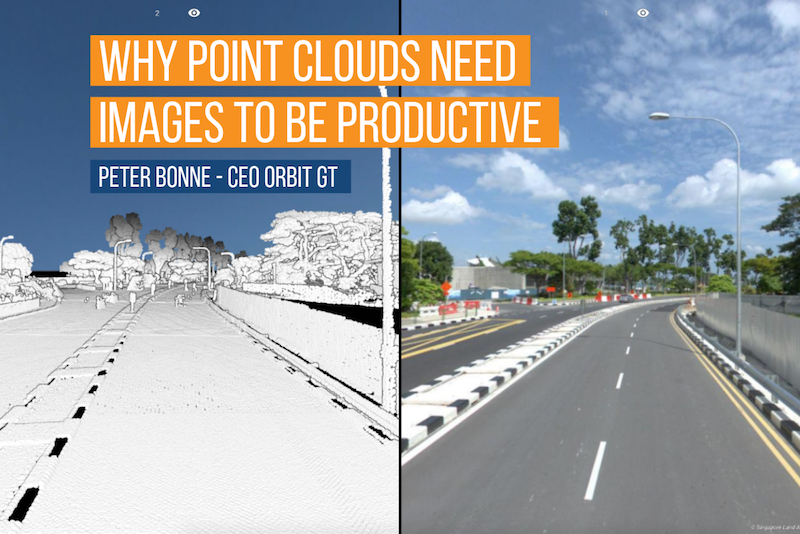
So how can we help ourselves to interpret a point cloud in a much more humane and clear way? The answer is very simple: an image. But not just any type of image. There’s one type that represents our human way of looking to the world in the best possible way and that is the spherical image.
Even today many users of point clouds do not have access to the imagery that fits with their data. They need training and lots of experience to extract qualitative results. And that is a dilemma that in my opinion should not be there.
When mobile mapping systems first started to combine cameras and laser scanners it opened up a whole new world of capabilities. The key element to the success of such systems is the perfect alignment between the different sensors. This perfect alignment makes it possible to add a 3D coordinate to every single pixel in every image. In simple words, you could now make a 3D measurement with a single click on an image. As normal as it looks today, we should not forget that this was unprecedented. Only one complex technique could match it: photogrammetry. But besides a single click measurement, photogrammetry was equally too complex just like the point cloud: only well-trained engineers could produce a good outcome.
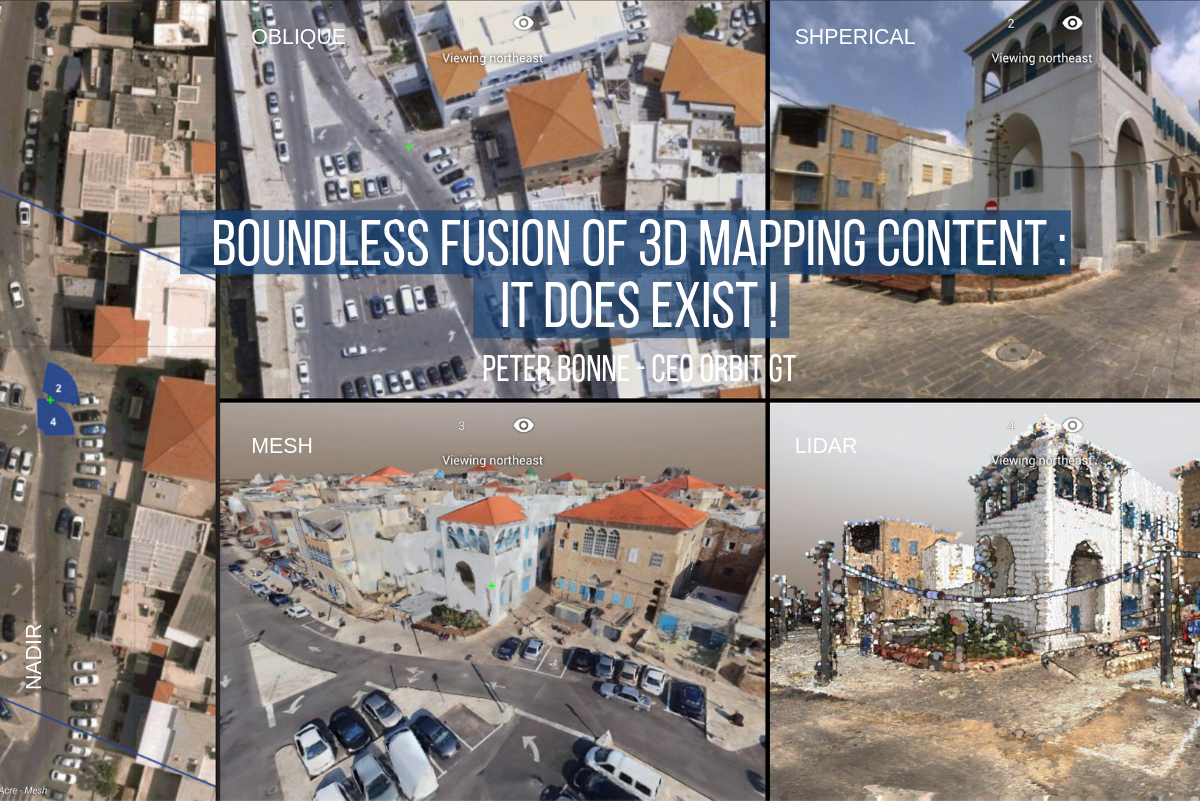
Combining multiple sensors is today a normal way of operating in surveying and mapping and reality capture. Some initiatives try to avoid having a second sensor and try to derive that data from the first sensor. A good and valuable example is the dense point cloud matching technology applied to aerial imagery. Others generate a 3D mesh from random images. Both generate valuable and spectacular visual results.
But in however way you create this data, it all comes back to the combination of an image and a 3D coordinates-based data set.
And this is where the end value is: a human being is used to perceive visual reality with both eyes covering a certain vertical field of view, and a much larger horizontal field of view. That’s simply who we are. Apply this to technology and the visual information that matches our natural way of viewing is best represented by a panoramic or spherical image. By giving non-technical people access to such imagery you provide them with a very natural user experience. Having perfectly aligned 3D coordinates, every pixel in the image is now measurable with a single click.
This technique may not be new but the fact that it is now no longer limited to 10 engineers but instead has become accessible to 10 000s of coworkers is a complete revolution.
I strongly believe that point cloud data is so valuable that we cannot allow it to get stuck away on hard drives in closets, nor to be used in a single project. By adding a spherical image we make especially mobile mapping data accessible to many people, who can then we use this data in many more projects.
I personally have been advocating all minor and major hardware manufacturers of mobile mapping systems to include a spherical camera on every system for many years. It is correct that today’s Spherical cameras may not offer the high resolution that is required for some projects. But that’s fine. Do add high-end cameras as you please but remember that only the spherical image will bring a second life to your expensive data.

Optimized procedures for slope inventory in Phoenix, Arizona
The American Disabilities Act (ADA) recognizes the significance of a city’s pathway infrastructure and is set out to make certain they pose no barrier to the mobility-impaired pedestrian by implementing a Public Right of Way Accessibilities Guidelines (PROWAG) ...